Publications
( show selected / show by date )
Research Topics: All Topics / Science Robotics & Nature Machine Intelligence / Dexterous Hands & Tactile Manipulation / Manipulation / Teleoperation / Legged Locomotion & Mobility
Hierarchical Generative Modelling for Autonomous Robots
Nature Machine Intelligence, Vol 5, 1402–1414, 2023
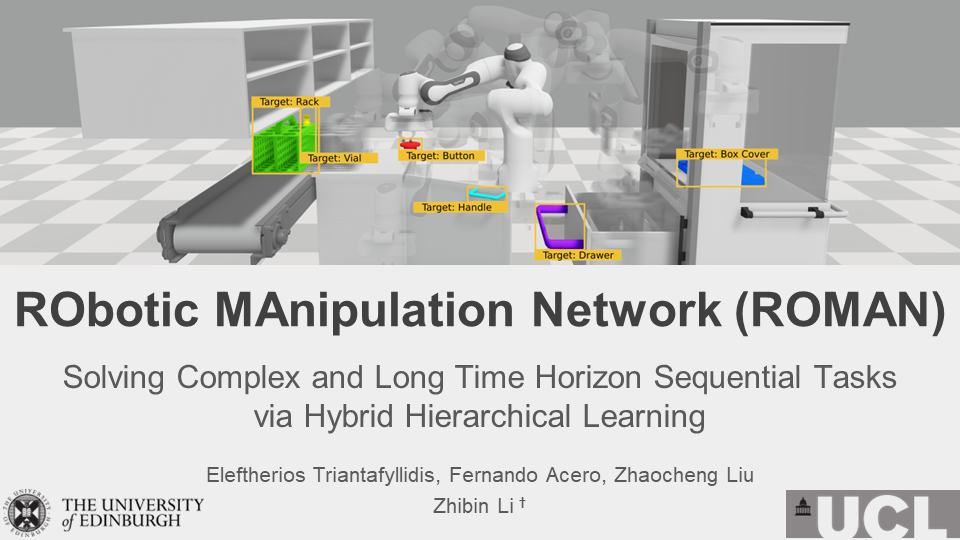
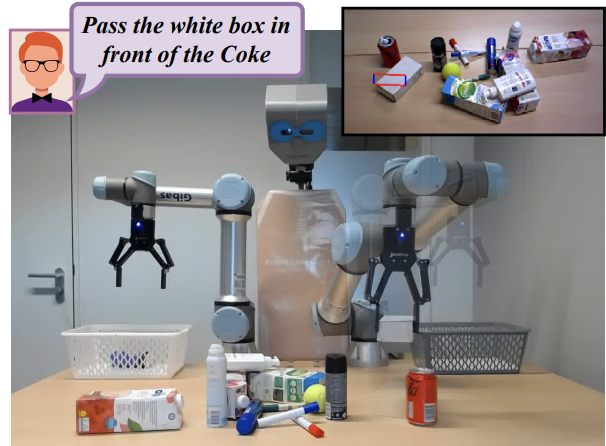
RObotic MAnipulation Network (RO-MAN): Hybrid Hierarchical Learning for Solving Complex Sequential Tasks
Nature Machine Intelligence, Vol 5, 991–1005, 2023
Identifying Important Sensory Feedback for Learning Locomotion Skills
Nature Machine Intelligence, Vol 5, 919–932, 2023
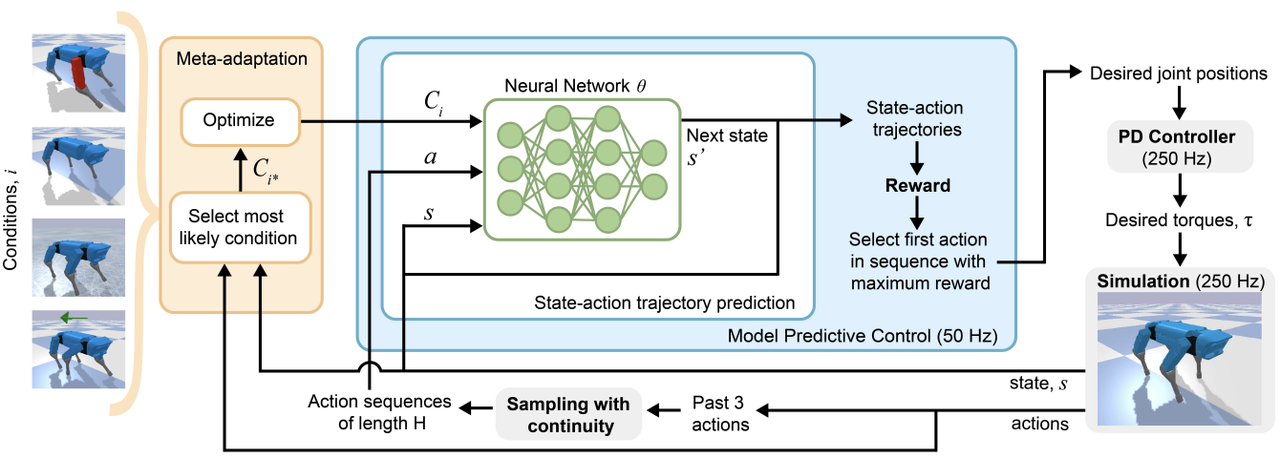
Multi-Expert Learning of Adaptive Legged Locomotion
Science Robotics, Vol 5 (49), 2020
Featured by BBC, Wired, and New Scientist
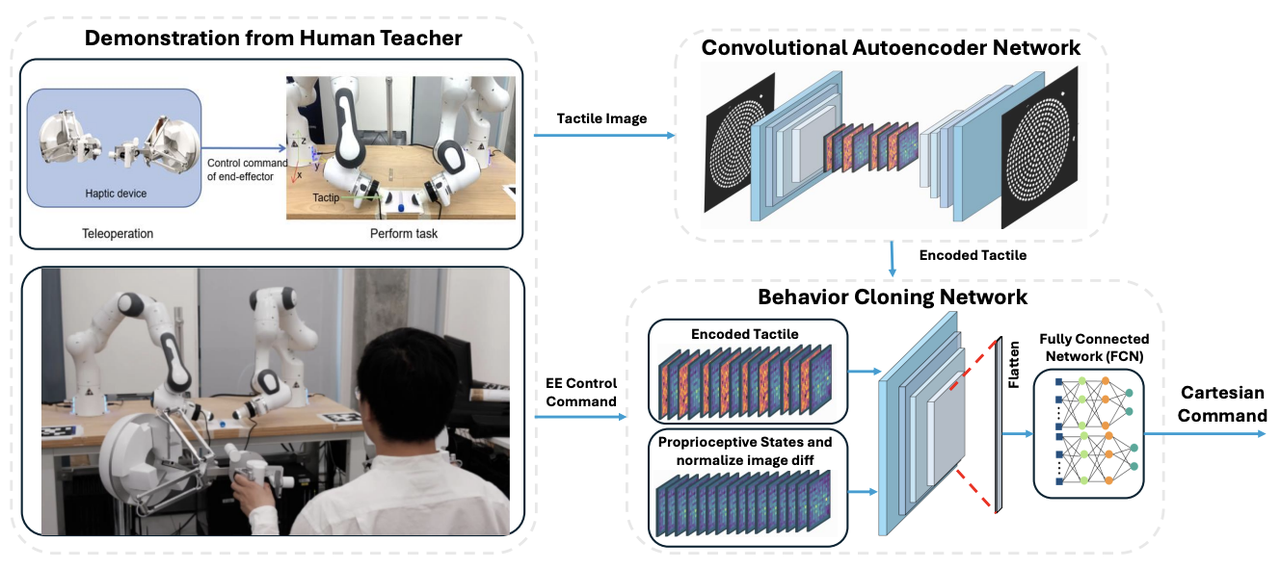
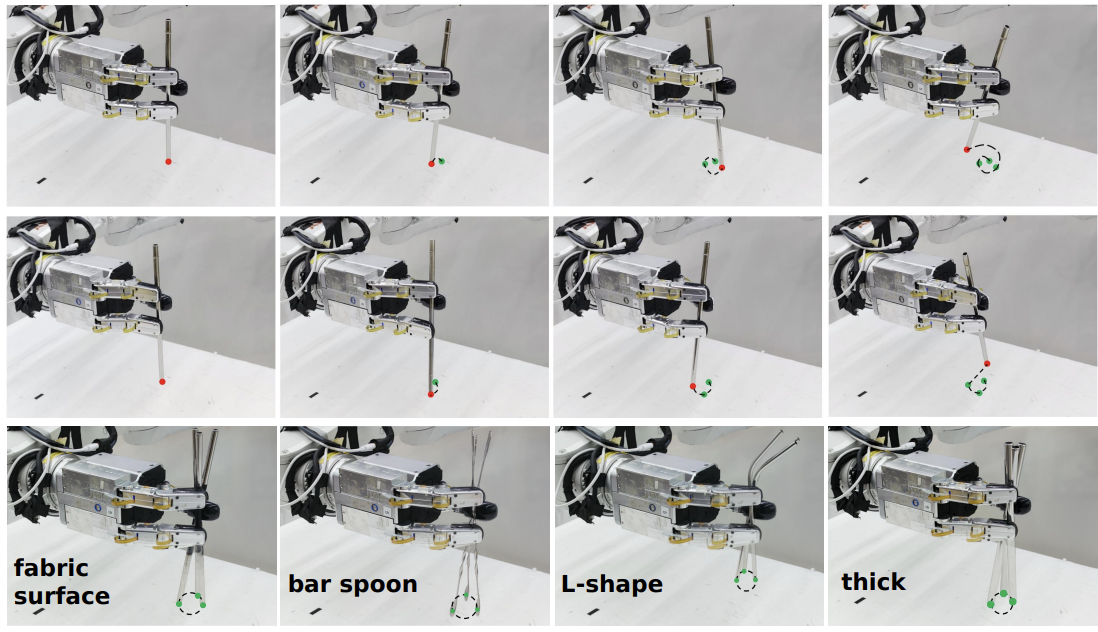
Efficient Tactile Sensing-based Learning from Limited Real-world Demonstrations for Dual-arm Fine Pinch-Grasp Skills
IEEE/RSJ IROS, 2024, pp. 5112-5119

Learning Adaptive Grasping From Human Demonstrations
IEEE/ASME Transactions on Mechatronics, 2022
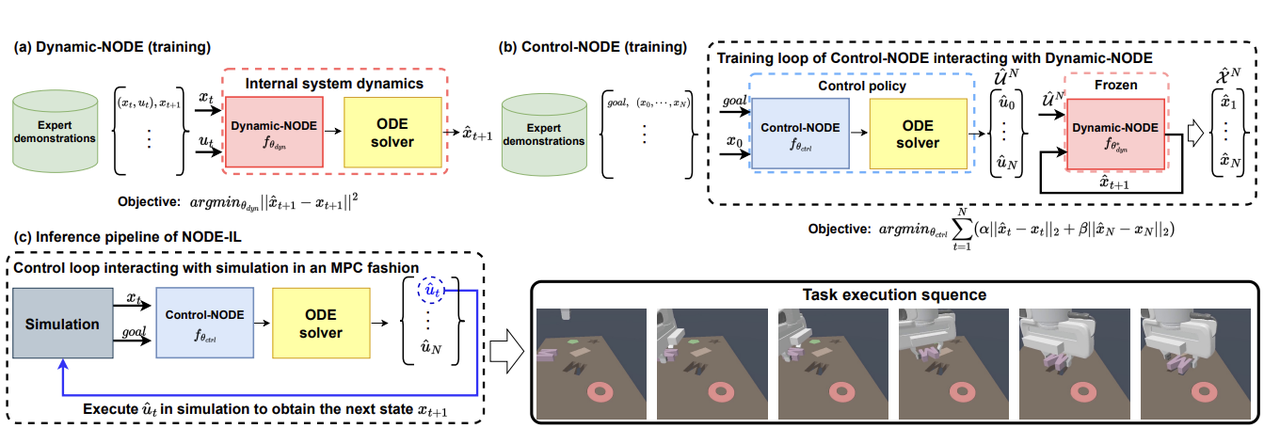
Neural ODE-based Imitation Learning (NODE-IL): Data-Efficient Imitation Learning for Long-Horizon Multi-Skill Robot Manipulation
IEEE International Conference on Intelligent Robots and Systems (IROS), 2024, pp. 8524-8530
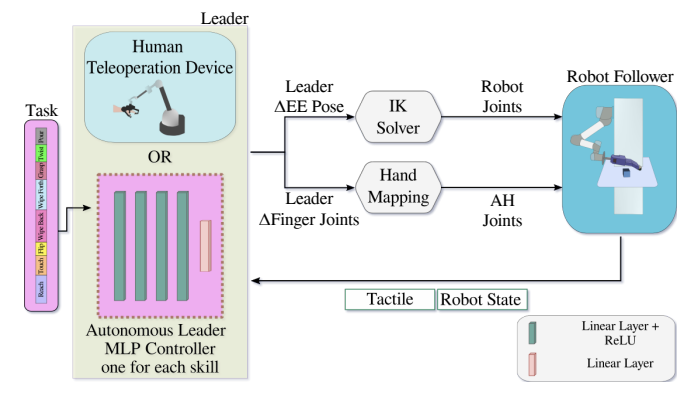
DexSkills: Skill Segmentation Using Haptic Data for Learning Autonomous Long-Horizon Robotic Manipulation Tasks
IEEE International Conference on Intelligent Robots and Systems (IROS), 2024, pp. 5104-5111
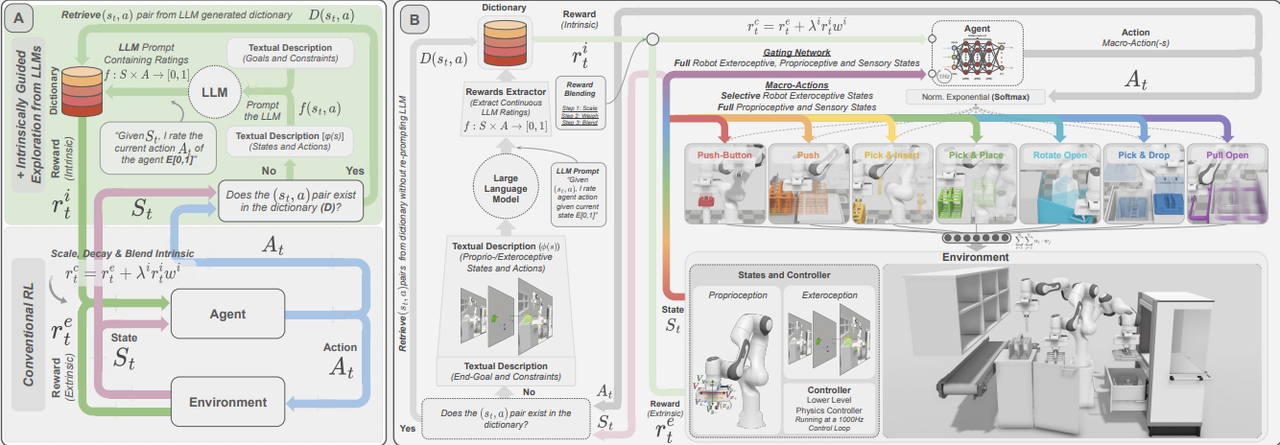
Intrinsic Language-Guided Exploration for Complex Long-Horizon Robotic Manipulation Tasks
IEEE International Conference on Robotics and Automation (ICRA), 2024, pp. 7493-7500
Modular Neural Network Policies for Learning In-Flight Object Catching with a Robot Hand-Arm System
IEEE International Conference on Intelligent Robots and Systems (IROS), 2023, pp. 944-951
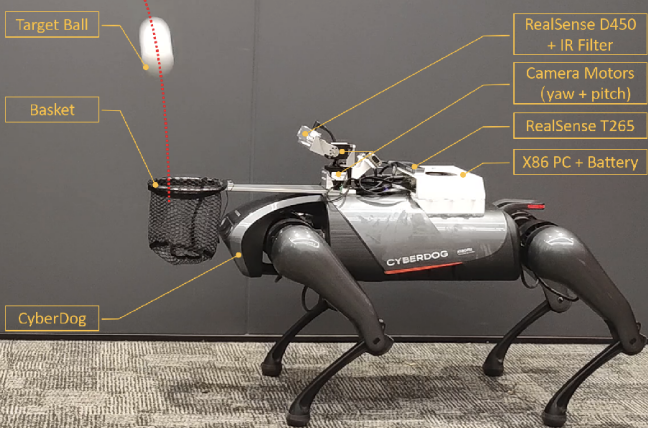
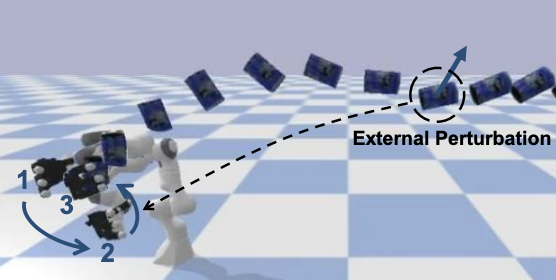
Run and Catch: Dynamic Object-Catching of Quadrupedal Robots
IEEE International Conference on Intelligent Robots and Systems (IROS), 2023, pp. 743-750
TiV-ODE: A Neural ODE-based Approach for Controllable Video Generation from Text-Image Pairs
Proceedings - IEEE International Conference on Robotics and Automation (ICRA), 2024, pp. 14645–14652
Language-guided Robot Grasping: CLIP-based Referring Grasp Synthesis in Clutter
Proceedings of The 7th Conference on Robot Learning, Vol. 229, 2023, pp. 1450-1466

Instance-wise Grasp Synthesis for Robotic Grasping
IEEE International Conference on Robotics and Automation (ICRA), 2023, pp. 1744-1750
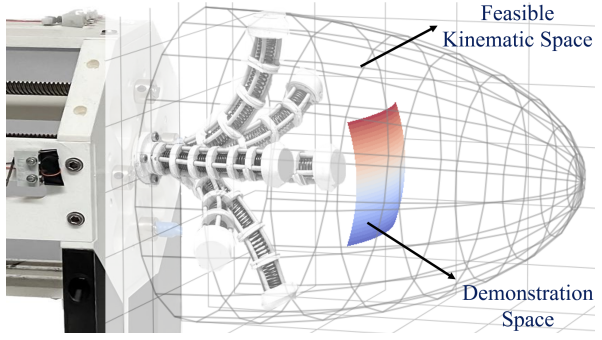
Data-efficient Non-parametric Modelling and Control of an Extensible Soft Manipulator
IEEE International Conference on Robotics and Automation (ICRA), 2023, pp. 2641-2647
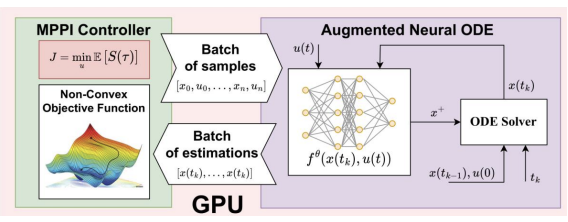
A Data-efficient Neural ODE Framework for Optimal Control of Soft Manipulators
Proceedings of The 7th Conference on Robot Learning, Vol. 229, 2023, pp. 2700-2713
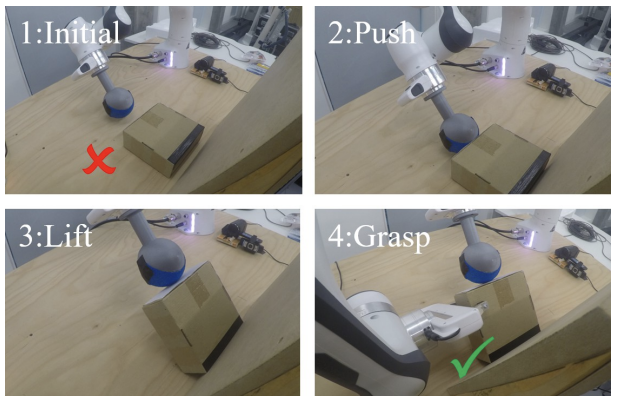
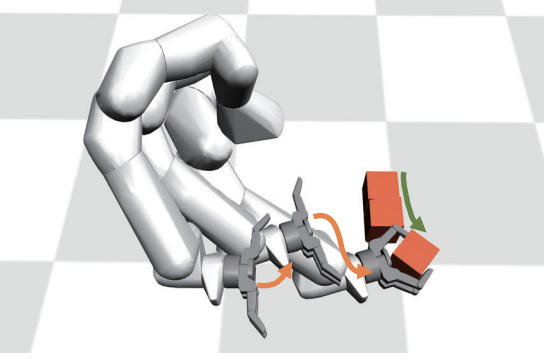
Learning Pregrasp Manipulation of Objects from Ungraspable Poses
IEEE International Conference on Robotics and Automation (ICRA), 2020, pp. 9917-9923
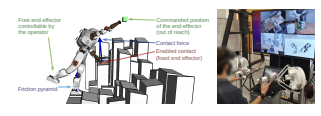
Robust High-Transparency Haptic Exploration for Dexterous Telemanipulation
IEEE International Conference on Robotics and Automation (ICRA), 2021, pp. 10146-10152
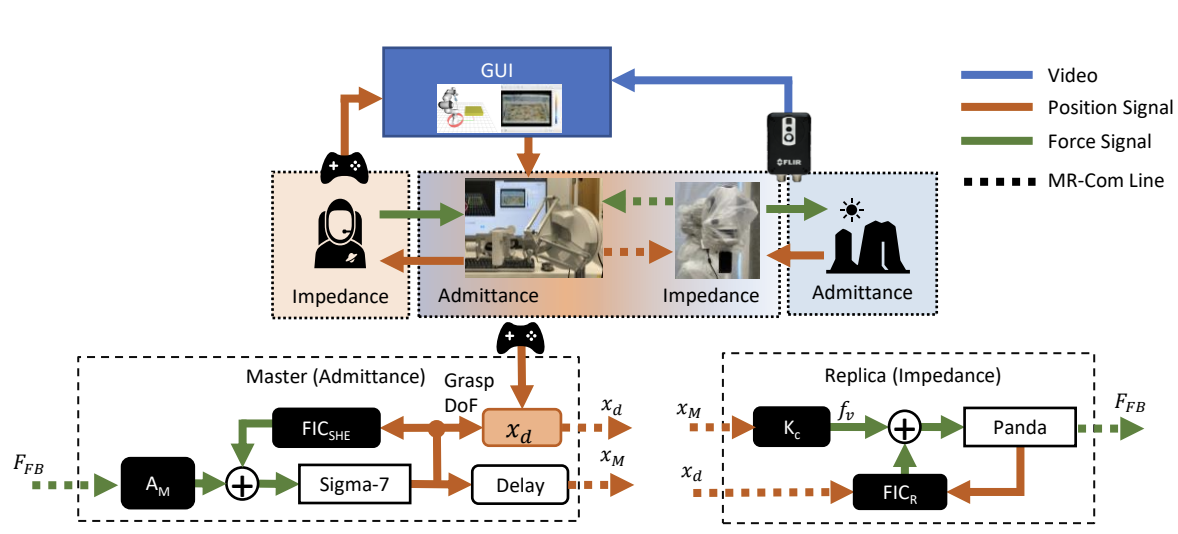
Haptic Bimanual System for Teleoperation of Time-Delayed Tasks
IEEE International Conference on Robotics and Biomimetics (ROBIO), 2021, pp. 1234-1239
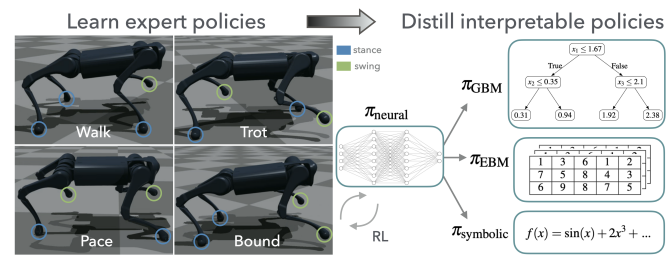
Distilling Reinforcement Learning Policies for Interpretable Robot Locomotion: Gradient Boosting Machines and Symbolic Regression
IEEE International Conference on Intelligent Robots and Systems (IROS), 2024, pp. 6840-6847
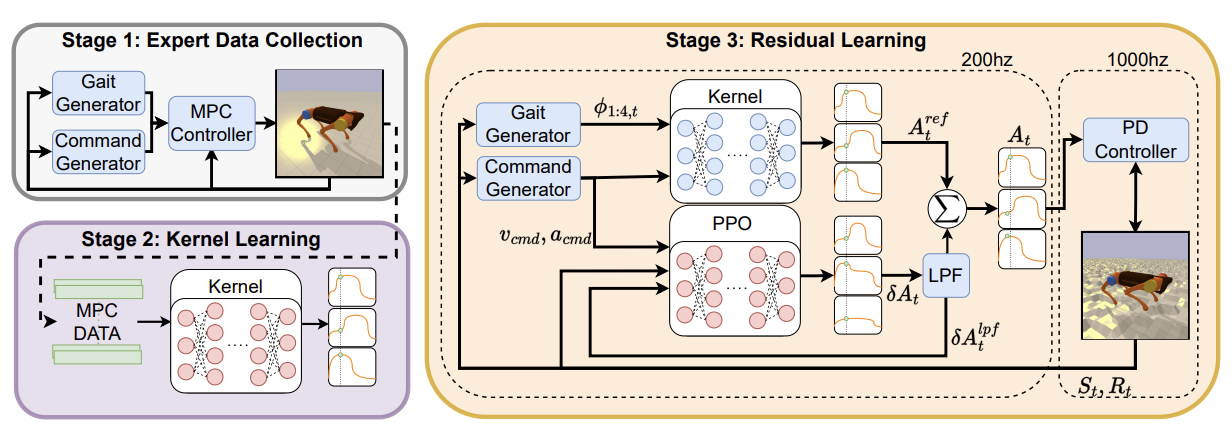
Agile and Versatile Robot Locomotion via Kernel-based Residual Learning
IEEE International Conference on Robotics and Automation (ICRA), 2023, pp. 5148-5154
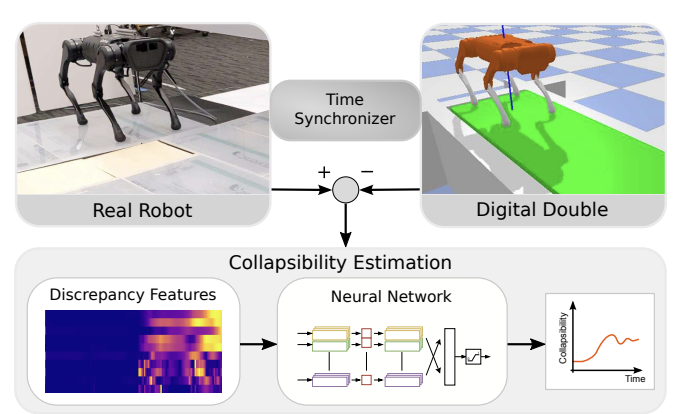
Real-time Digital Double Framework to Predict Collapsible Terrains for Legged Robots
IEEE International Conference on Intelligent Robots and Systems (IROS), 2022, pp. 10387-10394
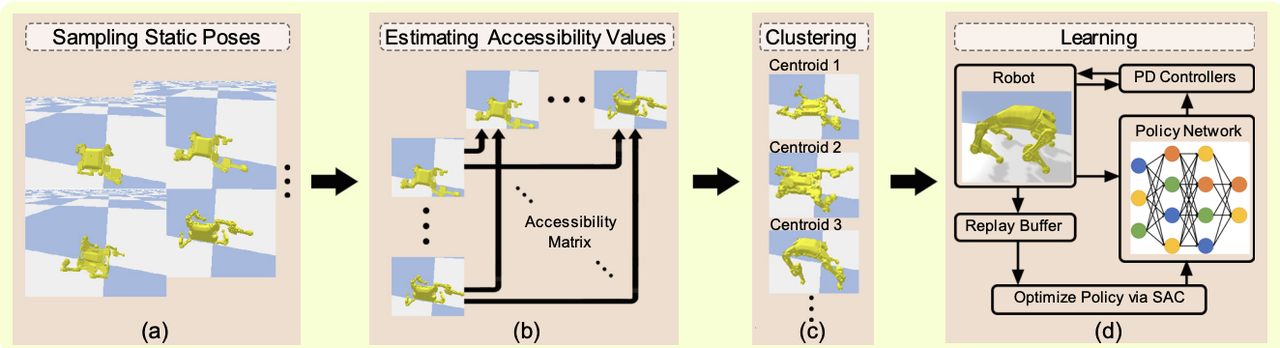
Accessibility-Based Clustering for Efficient Learning of Locomotion Skills
IEEE International Conference on Robotics and Automation (ICRA), 2022, pp. 1600-1606
Learning Motor Skills of Reactive Reaching and Grasping of Objects
IEEE International Conference on Robotics and Biomimetics (ROBIO), 2021, pp. 452-457
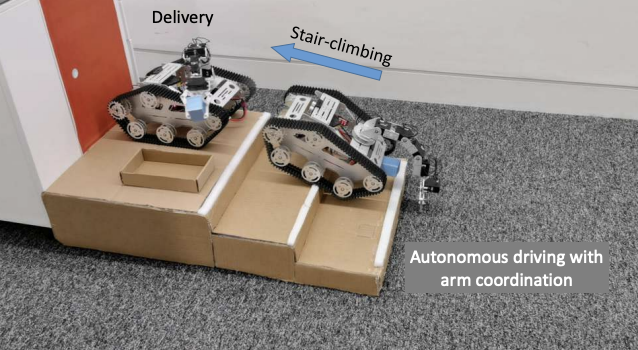
Learning Autonomous Mobility Using Real Demonstration Data
20th International Conference on Advanced Robotics (ICAR), 2021, pp. 428-434
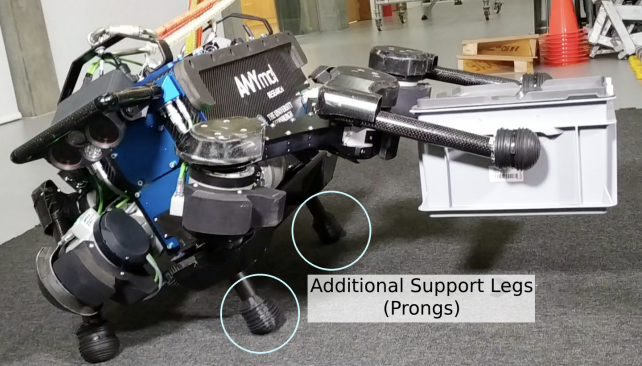
Optimisation of body-ground contact for augmenting the whole-body loco-manipulation of quadruped robots
IEEE International Conference on Intelligent Robots and Systems (IROS), 2021, pp. 3694-3701

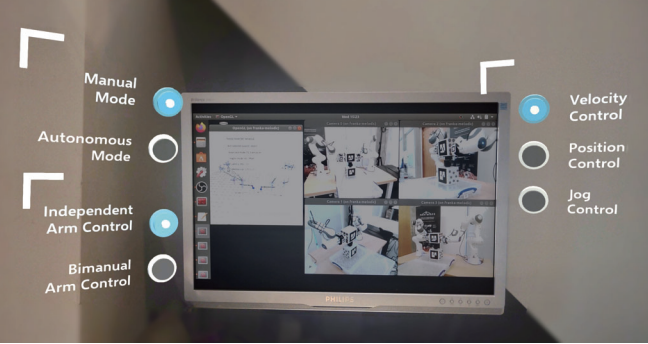
Variable Autonomy of Whole-body Control for Inspection and Intervention in Industrial Environments using Legged Robots
IEEE International Conference on Automation Science and Engineering (CASE), 2020, pp. 1415-1420