Alex Li
I am an Associate Professor of Robotics and AI at University College London, where I lead the Advanced Intelligent Robotics Lab. I received my Ph.D. in Robotics from the Italian Institute of Technology and the University of Genova, and previously held faculty and research positions at the University of Edinburgh and Italian Institute of Technology.
My research focuses on Embodied AI, robot learning, and intelligent control, with the overarching goal of enabling robots to perform skilful manipulation and locomotion in real-world domains.
I am particularly interested in combining deep reinforcement learning, vision-language models, and multi-agent systems to develop autonomous systems with human-level adaptability and beyond.
My work has been published in Science Robotics and Nature Machine Intelligence, and has been featured by BBC News, Wired, New Scientist, and TechXplore. I also serve as an Associate Editor for IEEE journals and actively engage in UK's national robotics initiatives.
Google Scholar / YoTube / LinkedIn /

News🚀
- Dec 2023 – Our work on Hierarchical Generative Modelling for Autonomous Robots was featured in UCL Engineering News.
- Oct 2023 – ROMAN, our new learning method for improving robot performance, was featured in UCL News. Project code available on GitHub.
- Sep 2023 – Our paper Identifying Key Sensory Feedback for Learning Locomotion was featured in UCL Engineering News.
- Dec 2020 – Our research on Multi-Expert Deep Learning of Adaptive Motor Skills was featured by major media outlets: BBC News, Wired, New Scientist, and TechXplore.
Projects ✍️
HARMONY: Enhancing Healthcare with Assistive Robotic Mobile Manipulation
We integrate cutting-edge perception, planning, and learning-based control into a holistic solution for robotic mobile manipulation in healthcare.
FAIR-SPACE Hub: UK Centre for Space Robotics and AI
As the UK's national centre of research excellence in space robotics and AI, FAIR-SPACE brings together state-of-the-art technologies in autonomy, planning, and control.
WALKMAN DRC: The WALKMAN Robot in DARPA Robotics Challenge
It was 1.85 meters tall advanced dexterous manipulation to compete in the 2015 DARPA Robotics Challenge Finals in performing disaster response.
Selected Publications📖 [All Publications]
DexSkills: Skill Segmentation Using Haptic Data for Learning Autonomous Long-Horizon Robotic Manipulation Tasks
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024
Hierarchical Generative Modelling for Autonomous Robots
Nature Machine Intelligence, Vol 5, 1402–1414, 2023
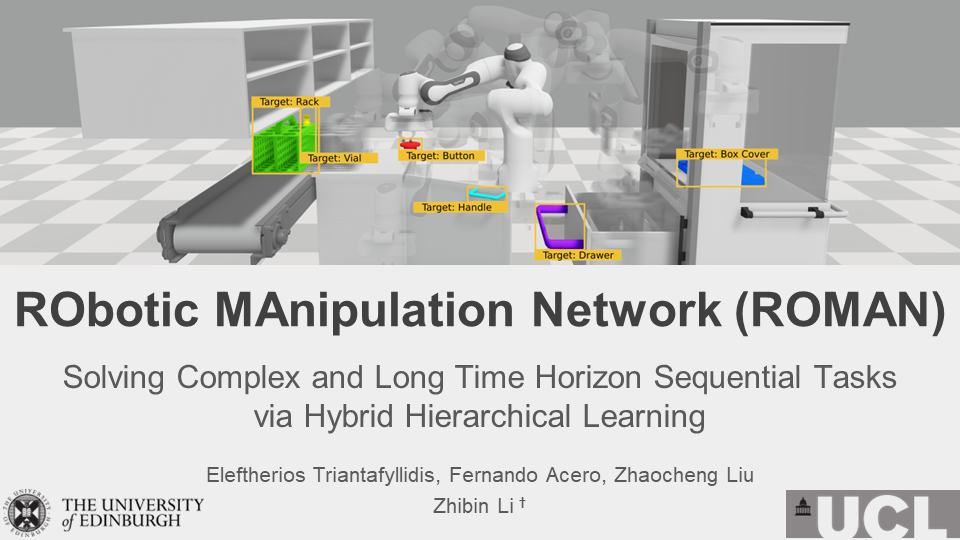
RObotic MAnipulation Network (RO-MAN): Hybrid Hierarchical Learning for Solving Complex Sequential Tasks
Nature Machine Intelligence, Vol 5, 991–1005, 2023
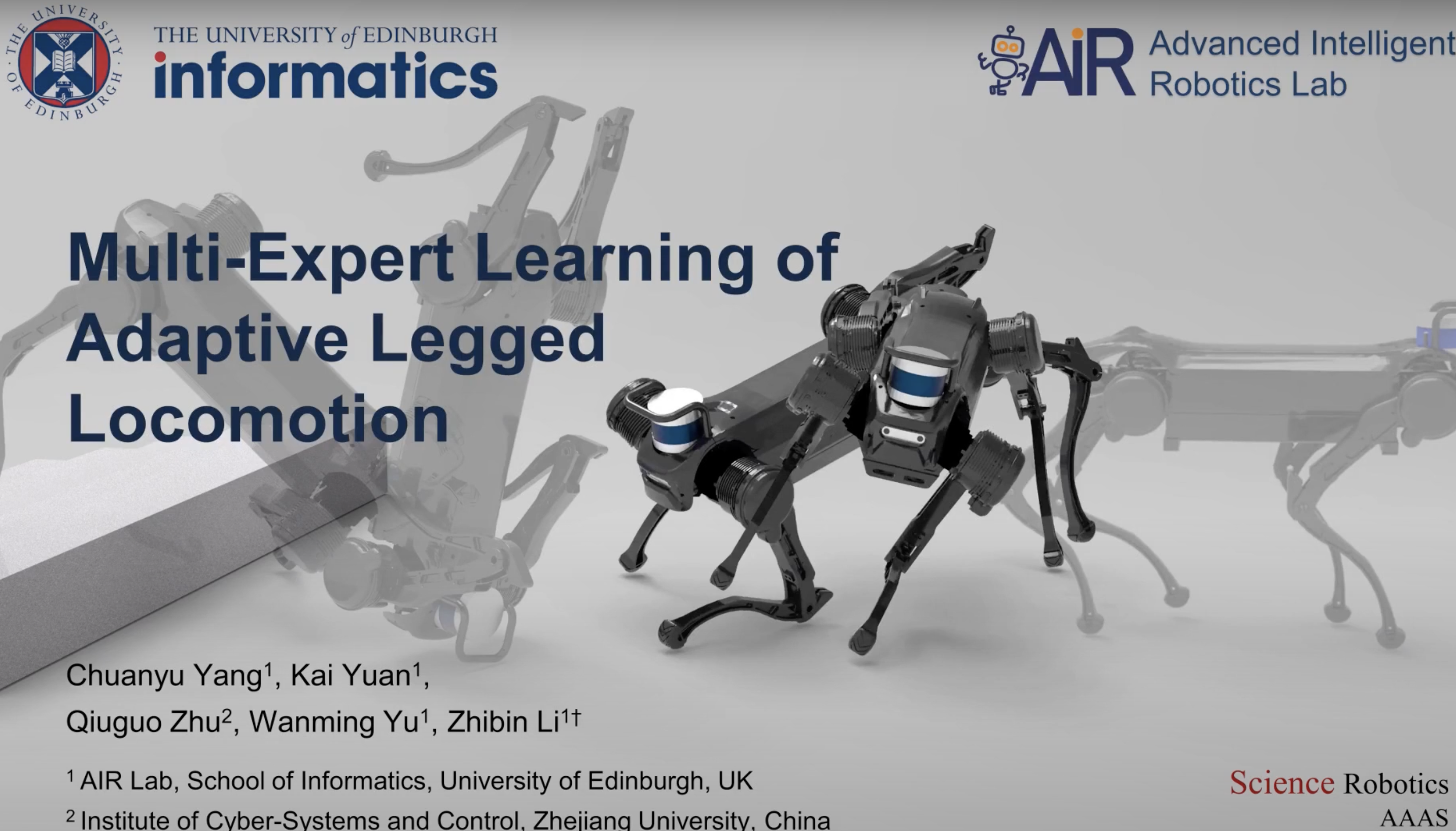
Multi-Expert Learning of Adaptive Legged Locomotion
Science Robotics, Vol 5 (49), 2020
Featured by BBC, Wired, and New Scientist
Instance-wise Grasp Synthesis for Robotic Grasping
IEEE International Conference on Robotics and Automation (ICRA), 2023, pp. 1744–1750

Learning Adaptive Grasping From Human Demonstrations
IEEE/ASME Transactions on Mechatronics, 2022
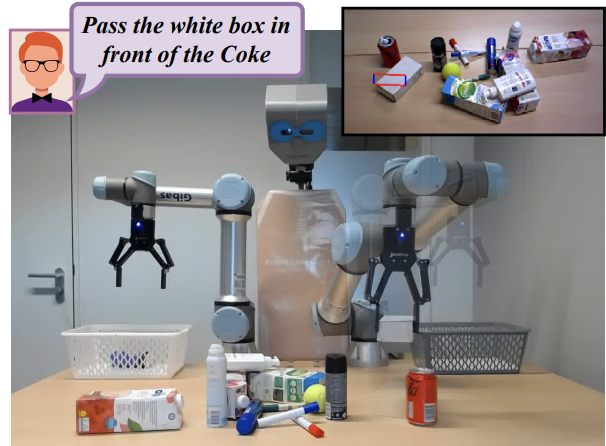
Language-guided Robot Grasping: CLIP-based Referring Grasp Synthesis in Clutter
Proceedings of The 7th Conference on Robot Learning, Vol. 229, 2023, pp. 1450-1466
Identifying Important Sensory Feedback for Learning Locomotion Skills
Nature Machine Intelligence, Vol 5, 919–932, 2023
Selected Talks 🎙️
- 2023 Jan – Invited talk at 4th UK Manipulation Workshop: "Learning Adaptive Motor Skills for Dexterous Manipulation and Grasping"
- 2021 Oct – Invited talk at IROS Workshop on Advances in Space Robotics: "Human-Centered Teleoperation for Space Robotics"
- 2021 Sep – Public talk at FAIR-SPACE/ORCA UK RAI Hub Webinar: "Remote bimanual manipulation and evaluation of operator's mental load and performance during teleoperation"
- 2021 Sep – Talk at Queen Mary University of London: "Learning motor skills for robot locomotion and manipulation"
- 2021 Jul – Talk at Tsinghua University: "Prospects of control and movement skills for robot locomotion"
- 2021 Jun – Talk at A*STAR Singapore: "State of the art of legged locomotion and future directions"
- 2021 May – Public talk at KTN Robotics & AI Showcase: "Haptic teleoperation for dexterous manipulation with variable autonomy and its future impact in the post-COVID era"
- 2019 Oct – Talk at Cardiff Centre for Artificial Intelligence & Robotics: "Machine learning for autonomous machines"
- 2019 – Keynote at International Conference on Intelligent Robotics and Applications: "From automation to learned autonomy – A new era for intelligent robots"
- 2018 Sep – Workshop at Royal Society of Edinburgh: "Dynamic motion of robots: from controlled movements to learned behaviours"
- 2018 Apr – Talk at A*STAR Singapore: "Advancement and challenges in robot control and motion planning: from locomotion to manipulation"
- 2017 Nov – Franco–Scottish Seminar, Royal Society of Edinburgh: "Reaching the unreachable: science of robot locomotion"
- 2016 May – Talk at ICRA Conference: "Online Detection of Balance Status of Legged Robots towards Versatile Whole-body Locomotion"